Home » Posts tagged 'STEM' (Page 2)
Tag Archives: STEM


Spread No More: The Effect Global Aid Has on the Spread of Tuberculosis
By Reina Wang, Maya Scully, Michael Fisher, Arthur Gao, III Form and Grace Zawadzki, V Form
Spread No More: The Effect Global Aid Has on the Spread of Tuberculosis
Editor’s Note: The Global Seminar teaching team works with all III Formers on an infectious disease project. This is a complex project that involves group work with other members of the III Form and with V Form biology mentors. The final result is exhibited in a poster session, allowing for visitors to do a gallery walk and have questions answered by the poster’s creators.

Please Click on Poster Image to See Slides of the Articles
ABSTRACT: Tuberculosis is an infectious disease that threatens health and life throughout the history, but with the help of global aid, there has been a solution to decrease the number of contagious people, especially in developing countries. It is a disease caused by Mycobacterium tuberculosis, which is a bacteria mainly attacking lung surfaces since it spreads through air. Latent and active tuberculosis are two types of the disease, in which latent tuberculosis does not show any symptoms while active tuberculosis does. The most common treatment is a prescribed combination of isoniazid and rifampin, but it only works if the patient completes the procedure and takes the medicine regularly. With the assistance of global aid, there have been many non-governmental organizations (NGO) dedicated to the treatment of tuberculosis worldwide. They offer treatments and technologies to developing countries which does not have access to them. Even if the volunteers who work at the NGOs have the possibilities to carry the bacteria when traveling and spread it to other places, global aid has made huge progress in dealing with tuberculosis. Global aid will influence more and more countries so that tuberculosis will slowly be dissolved in the near future.
Click here to view the articles, images, and graphics in a Google Slide presentation. (more…)

Explaining Length Contraction
By Danny Ciccarello and Helen Huang, V Form
Explaining Length Contraction
Editor’s Note: In “Modern Topics Physics,” students created videos to explain different topics associated with Einstein’s Theory of Relativity. The aim of the assignment included explaining the chosen topic in simple terms while avoiding the use of complicated equations.
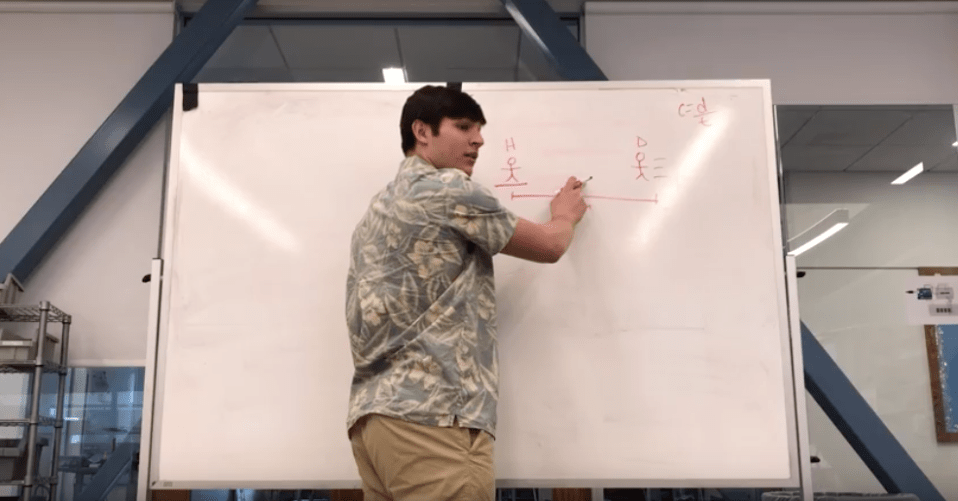
CLICK ON THE IMAGE TO VIEW THE VIDEO

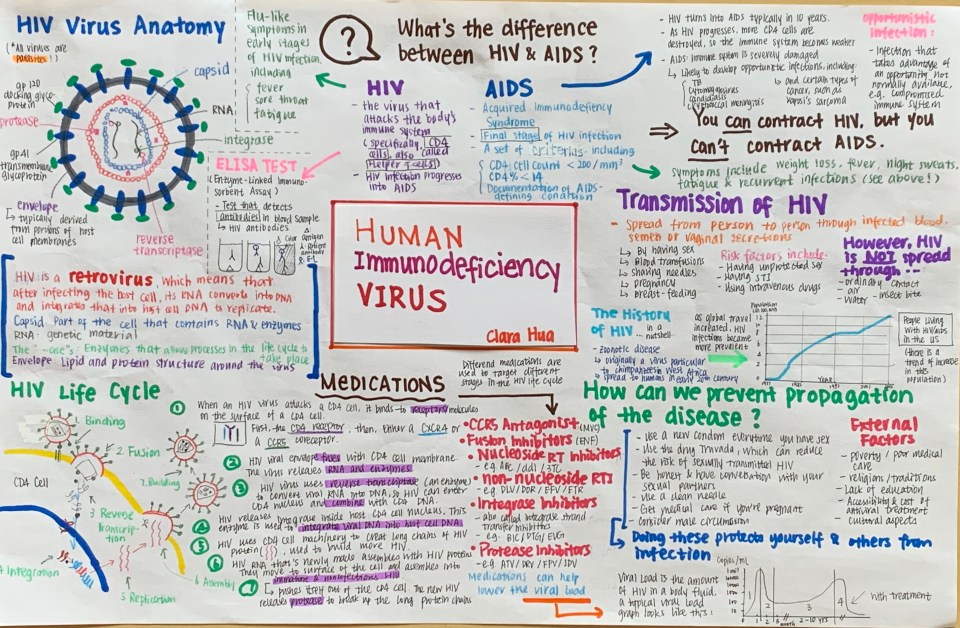
Annotated Diagram: Human Immunodeficiency Virus
By Clara Hua, IV Form
Annotated Diagram: Human Immunodeficiency Virus
Editor’s Note: The “Biology 30” class zoomed in to examine the cellular (and sub-cellular) impacts and zoomed out to consider some of the economic, geo-political, environmental and cultural factors that have an influence on the spread of this disease. An Annotated Diagram is a formal sketchnote that aims to demonstrate understanding of the information by presenting how the information (the full story of HIV/AIDS) was processed.

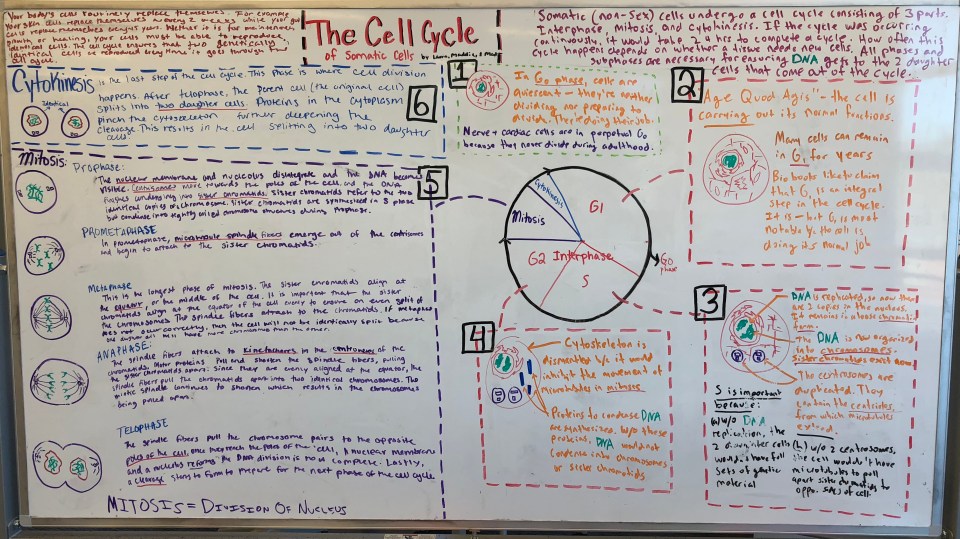
Mitotic Cell Division Artifact of Learning
By Matt Walsh, VI Form, Laura Sabino, V Form, and Maddie Wass, V Form
Mitotic Cell Division Artifact of Learning
Editor’s Note: See the image below of the whiteboard artifact images for the description of the assignment in Advanced Biology.

International Brain Bee Neuroscience Competition
By Samantha Wang, IV Form
International Brain Bee Neuroscience Competition
What is Brain Bee?
Brain Bee is a neuroscience competition for teenagers from around the world. The initiative of this competition, according to its founder Dr. Norbert Myslinski, is to find better solutions for brain disorders. Every year, Brain Bee is first held at the state level. Winners of each state then compete in the country’s Regional Brain Bee, and one representative from each Regional Brain Bee will be sent to the International Brain Bee World Championship. This competition assigns a variety of tasks to its participants. The first part of the Brain Bee is to answer multiple-choice questions, which have around thirty questions about either the brain’s structure and function or pathology and treatment of brain disorders. Participants are then given brain models, where they are asked to distinguish parts of a brain and state the functions they perform. The last part involves the most interesting task I have ever experienced in any competition: four “patients” with different brain disorders, with acting from the volunteers of the organization, tell the specific life experience with their diseases. The participants are asked to diagnose their neurological or psychiatric conditions. (more…)



Green Sea Turtle – Chelonia mydas & Marine Turtle Exhibition
By Cadence (Catie) Summers, IV Form
Green Sea Turtle – Chelonia mydas & Marine Turtle Exhibition

Green Sea Turtle – Chelonia mydas
Stage in Maturity – Adult (more…)