Home » Posts tagged 'STEM'
Tag Archives: STEM
Inverted Airfoils’ Abilities to Prevent Wind Storm Roof Destruction
By Yolanda Zhou, VI Form
Inverted Airfoils’ Abilities to Prevent Wind Storm Roof Destruction
Student-Submitted Note: This paper investigates a new way to reduce aerodynamic lift created around houses’ roofs in extreme windstorms. Three test models were created in computer modeling software OnShape and simulated in CFD using OpenFOAM. This project was inspired by the concept of “downforce” used to stabilize Formula One race cars. This paper was written for submission to the High School Science Symposium (HiSci) in May 2023 as part of the STEM Fellowship.
Abstract
As severe windstorms increase in frequency and intensity, more residential houses are predicted to be vulnerable to structural damage by severe windstorms towards the end of the 21st century. Wind around the roof exerts a negative pressure that lifts the roof up and threatens the structural integrity of houses. In this paper, a novel method of mitigating lift using inverted airfoils was explored through CFD simulations. The performance of the model was assessed through three criteria: net lift coefficient, effectiveness under different wind directions, and manufacturability. Visual representations of pressure and velocity distribution of the airflow over the model were analyzed to validate simulation data. Single inverted airfoils and round airfoil-shaped roofs were tested for the first prototype. A further iteration of the prototypes improved the model performance. All roof configurations were able to reduce the overall lift of the system when compared to the control group. Single airfoil roof setup was most effective at reducing net lift, while round roof setup was effective in a wider range of wind direction conditions. Rectangular Roof setup combines the advantages of both setups and reduces more net lift than the Revolved Airfoil setup.
Introduction
As global climate change accelerates, the intensity and frequency of wind disasters, such as tropical cyclones and tornadoes, are predicted to increase significantly by the end of 21st century [8]. The increase in the intensity of tropical cyclones is found to be correlated to the rise of Sea Surface Temperatures [8]. Furthermore, Category 4 and 5 tropical cyclone activities, which have wind speeds that exceed 150 miles per hour, are likely to increase in the late 21st century [10]. Such tropical cyclones, although very rare, are catastrophic and account for around half of the economic damage done by all tropical cyclones in the US [6]. In 2013, an EF-5 category tornado hit Moore, Oklahoma. Reaching a speed of over 200 miles per hour, type EF-5 tornadoes are the rarest and most destructive type of tornado on Earth. The tornado caused 24 deaths, more than 200 injuries, and billions of dollars for repairing the destroyed houses and facilities [3]. Overall, tropical cyclone frequencies, intensities, and damages are projected to increase as the global climate continues to get warmer [10]. High School Science Symposium 2022
(more…)
The Impact of Black Sesame Pigment on Drosophila Melanogaster with Alzheimer’s Disease
By Ally Bauer, VI Form
The Impact of Black Sesame Pigment on Drosophila Melanogaster with Alzheimer’s Disease
My project for the STEM Fellowship was studying the impact of black sesame pigment on drosophila melanogaster with Alzheimer’s disease. Alzheimer’s Disease is a neurodegenerative disease that affects over 44 million people worldwide. One of the hallmarks of Alzheimer’s Disease are amyloid-beta plaques that form in between the neurons and disrupt cell communication and function. Black sesame pigment, derived from black sesame seeds, has been proven to reduce the aggregation of these plaques in vitro studies. Drosophila melanogaster, or fruit flies, are wonderful model organisms that are utilized for their quick reproduction rate, easily manipulated genome, and the relation its genome has with humans. For my experiment, I was able to track the progression of memory loss in flies with Alzheimer’s disease. I had multiple groups to show me if greater concentrations of black sesame pigment would slow the progression of memory loss in the flies. Although the results of the experiment proved my null hypothesis to be correct, I now have a greater understanding of Alzheimer’s Disease, the scientific method, and having control over what I learn and how I learn it. I am incredibly grateful for Ms. Lohwater, Mr. Loomer, Mr. Valitutto, and the five other STEM Fellows who have mentored me, shaped my project, and problem solve throughout the year.

Understanding and Building a Tesla Coil: A Matthews Fund Grant
By Domenic (Dom) Mongillo and Aditya Mynampaty, VI Form
Understanding and Building a Tesla Coil: A Matthews Fund Grant
The Matthews Fund provides grants to students of any form who are good citizens and solid students. Awards are based on merit and need as determined by a faculty committee. Grants are made for special needs such as tutoring assistance, special instruction, seminars, academic experiences of a national or international nature, and personal growth and advancement opportunities.
Last year, we applied for and were fortunate to receive the Matthews Grant. Our hope was to use the resources given to us from the fund to further our understanding of electronics by building Tesla coils. We expanded upon this idea by using our Fifth Form Lion Term as an opportunity to build these coils while studying the complicated electronics inside of them with the help of resources from the school. We then continued to work on the coils throughout the summer and into this academic year. From this experience, we have learned an incredible amount about electronics and about the work and determination that goes into a complicated engineering feat.
In addition to funds for purchasing Tesla coil kits, spare parts, and equipment needed to construct the coils, our grant also enabled us to take a trip to the Museum of Science in Boston. The museum featured an exhibit called Lightning! that included a variety of machines that demonstrated electronic principles like the world’s largest Van de Graaff Generator, plasma balls, and, of course, several very large Tesla coils. We visited this exhibit and studied the coils, and we were able to go onstage after the presentation to talk with one of the people who worked to build the coils used in the demonstrations.
(more…)
The Causes and Symptoms of Lung Cancer and the Treatments of the Two Main Types of Lung Cancer
By Brillon Joseph, V Form
The Causes and Symptoms of Lung Cancer and the Treatments of the Two Main Types of Lung Cancer
Introduction
Choi, Clark, and Douglas (2012) state that “cancer is not a single disease but includes many different diseases. In cancer cells, mutations modify cell-cycle control and cells don’t stop growing as they normally would” (p 452). Cancer is a result of gene mutations in the cells that make up the tissues and organs of the human body. When normal cells undergo gene mutations, this can be a result of inheritance, aging, or damage to genes by factors such as radiation. These mutated cells form cancer cells, which grow and divide uncontrollably. Cancer has been a very prominent epidemic in the world in recent years. Every day, more and more people are diagnosed with cancer and suffer from the fatal effects of this disease. Statistics show that in 2018 alone, there were approximately 18 million new diagnoses of cancer and 9.6 million cancer-related deaths worldwide. One of the most common types of cancer is lung cancer. There are several types of lung cancer that involve different causes, symptoms, and treatment options.
What Is Lung Cancer?
Lung cancer is one of the most common types of cancer worldwide. According to the World Cancer Research fund, lung cancer constituted 12.3% of all new cases of cancer diagnosed in 2018. The Center for Disease Control (CDC) states that lung cancer is a medical condition that leads to cells in the lungs dividing uncontrollably. This causes tumors to grow and thus reduce a person’s ability to breathe (Nall 2018). When cells in the lungs are abnormal, they do not carry out the necessary functions as efficiently as a normal cell would. As these abnormal cells continue to grow and divide in an uncontrollable manner, they form tumors. Consequently, these tumors may impact the individual’s ability to breathe properly. Lung cancer can be broadly classified into Small-Cell Lung Cancer (SCLC) or Non-Small Cell Lung Cancer (NSCLC). “This classification is based upon the microscopic appearance of the tumor cells themselves, specifically the size of the cells” (Stöppler [date unknown]). The two types of lung cancer also differ in terms of spread, growth, aggression and applicable treatments.
(more…)
The LEGO Blue Suitcase Project
By Reina Wang, IV Form
The LEGO Blue Suitcase Project
In late August, I traveled to Pakistan as a part of the robotics Blue Suitcase Project. I brought the suitcase to The Lynx School in Islamabad, Pakistan. Pakistan is a country with a particularly high out-of-school rate for many children, especially girls. The head of school at The Lynx School was especially excited to hear about our project since there are few schools in Pakistan that offer Lego lessons, even among private schools.
During the Lego workshop, I first introduced the school to our robotics team and showed them photos of our new STEM building, the FRC competition we went to, and the robots we built from previous years. They were impressed by what we did and became increasingly interested in STEM. Starting with a basic understanding of all the parts of the Lego suitcase, the children began building the Lego car in small groups. The engineering part is about creativity, and they used their imagination to design the car based on the model given by the instructions. Then we moved on to programming with touch sensors, teaching the students how to go straight, turn, and bounce back once the car hits the wall. After I led them through the techniques, the children were able to create their own paths with a number of obstacles.
This experience is brand new for the children I met in Pakistan. Lego inspires children with creativity, enhances their logic and problem-solving skills, and cultivates the ability to cooperate, communicate, and lead. The Lynx school is hoping to spread Lego robotics to many other schools in Islamabad, and they hope we can bring more advanced Lego systems back next year.

The Marble Launch Project
By Jocelyn Cote and Maya Scully, IV Form
The Marble Launch Project
Editor’s Note: The Marble Launch Project was part of Mr. Bauer’s physics final assessment at the end of the 2018-2019 school year. Given a shooting angle for the marble launcher and a random location anywhere on school grounds, the students’ task was to predict accurately where the marble would land with a six-inch landing strip. The class was given two weeks to prepare for the challenge. When the students felt confident and ready to shoot the marble, they were given a location and angle. The students had fifteen minutes to finalize their calculations, and they had only one attempt at the challenge. Multi-level locations were used for this challenge, especially those within The Center.
(more…)
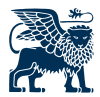
Bio-ink: Evaluation of Protein as Biomaterials for 3D Bioprinting
By Jiwon Choi, VI Form
Editor’s Note: This STEM Fellowship project by Jiwon won the Worcester Regional Science and Engineering Fair (1st out of 130+ students). She placed third out of all 200+ projects at the Massachusetts Science and Engineering Fair allowing her to compete at 2019 ISEF in Phoenix.
Three-dimensional (3D) bioprinting is one of the most promising methods of tissue engineering as it provides unprecedented versatility and precision in delivering cells and biomaterials to desirable places. However, limitations still exist in the availability of bioinks with natural bio-macromolecular components. In this research, chicken albumin is evaluated as a potential bioink for direct extrusion bioprinting of hollow constructs through alginate-templated crosslinking. Channel diameter, wall thickness, and bioink feed rates are calculated to assess the printing performance of the alginate-based bioink. It is shown that an albumin-based bioink with as low as 1.33% of total alginate concentration can be employed to successfully print microfibrous hollow constructs with a uniform diameter.
Click on Image to View PDF of Jiwon’s Poster

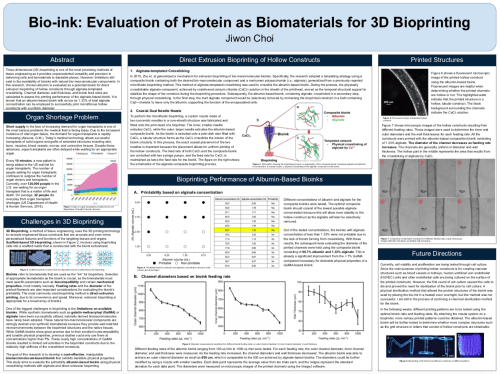
The Effects of the Ketogenic Diet’s Effect in a Drosophila Melanogaster Model of Parkinson’s Disease
By Grant Gattuso, VI Form
The Effects of the Ketogenic Diet’s Effect in a Drosophila Melanogaster Model of Parkinson’s Disease
Abstract
Click on Image to View PDF of Poster
Parkinson’s Disease (PD) is a neurodegenerative disease that causes the loss of dopaminergic neurons in the substantia nigra. This disease is chronic and causes tremors, muscle rigidity, difficulty speaking, and many other symptoms that debilitate the individual and deteriorate their quality of life significantly. Currently, there is no cure for PD. Previous research shows that mitochondrial dysfunction plays a significant role in the death of the dopaminergic neurons in PD. Since the ketogenic diet – a four to one ratio of lipids to carbohydrates – has been shown to improve mitochondrial function in diseases like Epilepsy and Alzheimer’s, the ketogenic diet could delay or improve the onset of Parkinsonian symptoms. This study measured the effects of the ketogenic diet in a PINK1Drosophila melanogaster model of PD through a mobility test. Preliminary data found that the ketogenic diet can increase the mobility of PINK1 Drosophila melanogaster for at least four days and potentially even up to eight days, confirming the hypothesis. Four to eight days could correspond to many human years if the same beneficial effects were found in humans.
To read Grant’s full STEM Fellowship paper, click here. (more…)