Home » Posts tagged 'Science' (Page 3)
Tag Archives: Science

Autism-Vaccine Controversy: Video
By Izzy Kim & Riya Shankar, VI Form and Haley Dion & Laura Drepanos, V Form
Autism-Vaccine Controversy: Video
Editors’ Note: In Advanced Biology, students were encouraged to tell the story that they felt compelled to relate about their Public Health issue (click here for assignment). In this video, the students integrated a given Case Study with relevant information gathered through independent research. Their integration of the Case Study with additional research reflects an advanced understanding of, and ability to convey, scientific content.
Click on Image for Video

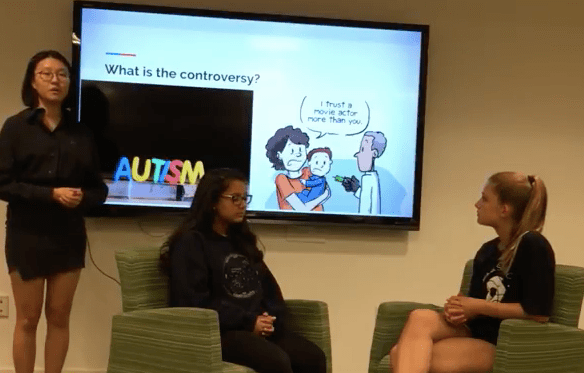
Diminishing the Diversity of Devastating Diarrhea
By Geetika Surapaneni, Frances Hornbostel, & Graham Butterfield, III Form with Will Figueroa, V Form
Diminishing the Diversity of Devastating Diarrhea
Please click the image to download/see the poster. Scroll below to see each individual piece.
CLICK ON EACH IMAGE BELOW TO ZOOM TO EACH PIECE OF PROJECT. (more…)

Autonomous Navigation and Decision-Making Process Using Machine and Deep Learning
By Jeongyong Chris Yang, VI Form
Autonomous Navigation and Decision-Making Process Using Machine Learning and Deep Learning
Abstract

Please click the image to download/see the poster. Zoom in to read specifics.
Autonomous vehicles are self-driving cars that do not require human drivers. They use sensors that are attached to the vehicle as their vision to detect their environment. After the vehicle detects other objects or signals, computer programming (coding) allows them to react to the situations adaptively. Even though the sensors do not need to be improved, the millions of situations the cars can face on roads create difficulties for people to build a sophisticated computer program that makes the autonomous vehicles completely safe on roads.
First, I decided to build an algorithm pseudocode to help resolve this problem. During this process, I built mazes and followed the instructions based on the algorithm manually to check whether the algorithm is effective. I mainly used three different models for my mazes, each with different difficulty levels to ensure that the algorithm works every time. Then, I decided to record the information (velocity and displacement for both x and y directions) about the vehicle on the map so that the following vehicles can get a picture of the map automatically. However, if the subsequent vehicle detects a different or an altered map with its sensors, the new information will also be recorded on the map. Finally, the final vehicle will follow the path set by the first vehicle, but the map will guide the car with the most efficient path after completely learning and optimizing the possible paths.

20% Time Project: Gardening–The Long Process of Planting
By Eve Elkins, III Form
20% Time Project: Gardening–The Long Process of Planting
Editors’ Note: In Ms. Amanda Hultin’s III Form English classes, her students pursue 20% Time (or “Genius Hour”) projects. Some essential elements include taking control of one’s own learning, choosing an individual topic, deciding how to learn and to produce a public product, and reflecting on the process.

Click on image to view Eve’s Padlet.
Reflection on learning:
*What content/information did you learn during this project?
I learned about gardening. I learned that the perfect time to water the plants is in the afternoon. If you water them at night or early morning, they are more likely to grow fungus. I also learned that snap peas, which was the vegetable I was growing, grow best in mid-spring, which was when we started this project. They also have the quickest growing rate which was about two months. That is how I came to choose snap peas. When I contacted the manager of Chestnut Hill Farms, I was able to find out about the evolution about gardening. Now, in current times, gardening has shifted to being grown indoors all year round. Gardening used to be seasonal but now, due to modern technology, there have been trucks and trailers developed to sustain plants even in winter. Lots of people still garden but the way we do it has changed. (more…)

Biology: Membrane Structure and Function
By Alex Cardonick, V Form
Biology: Membrane Structure and Function
Editors’ Note: In Advanced Biology, students are often evaluated on the reflection of their learning process. They constantly ask themselves questions that demonstrate advanced scholarship such as “How am I connecting each part of my learning into a flowing story?” and “What do I still not understand?” This form of deep reflection is summarized in each student’s ePortfolio at the end of a unit, which includes several different Learning Outcomes ranging from “Dynamic Homeostasis” to “The Central Dogma of Biology.” These Learning Outcomes are often present throughout multiple units, and therefore challenges the students to synthesize information across different areas of focus.
Linked here is Alex Cardonick’s ePortfolio on Learning Outcome 6: Membrane Structure and Function, including four Artifacts of Learning, including text, video, and images.
Introductory Narrative:
Cell membranes act as the “guards” of the cell. Membranes’ structure consists of phospholipids tightly  knitted together by their hydrophobic tails, with the hydrophilic heads sticking out on either side. This phospholipid bilayer structure makes membranes semi-permeable; they let small, non-polar molecules such as water and carbon dioxide in, while keeping out large and polar substances such as starch and Iodide anions. In addition, cell membranes can be modified to help cells perform specific functions. Proteins added into the phospholipid structure can create transport channels for molecules that cannot travel through the membrane itself, such as Na+ ions in the nerve impulse. These ions allow a neuron to send a signal in the form of an action potential. Furthermore, molecules and ions can even move against the concentration gradient by active transport when a transport protein and outside energy are provided. This type of movement across a membrane allows essential functions such as the repolarization of the nerve impulse to occur when Sodium-Potassium pumps “reset” the nerve impulse to its resting membrane potential by moving the ions against the concentration gradient. (more…)
knitted together by their hydrophobic tails, with the hydrophilic heads sticking out on either side. This phospholipid bilayer structure makes membranes semi-permeable; they let small, non-polar molecules such as water and carbon dioxide in, while keeping out large and polar substances such as starch and Iodide anions. In addition, cell membranes can be modified to help cells perform specific functions. Proteins added into the phospholipid structure can create transport channels for molecules that cannot travel through the membrane itself, such as Na+ ions in the nerve impulse. These ions allow a neuron to send a signal in the form of an action potential. Furthermore, molecules and ions can even move against the concentration gradient by active transport when a transport protein and outside energy are provided. This type of movement across a membrane allows essential functions such as the repolarization of the nerve impulse to occur when Sodium-Potassium pumps “reset” the nerve impulse to its resting membrane potential by moving the ions against the concentration gradient. (more…)

Evolution and Revolutions in Physics (with Tiki-Toki)
By Tony Banson, Colton Bullard, John Cho, Thayer Cornell, Alan Gao, Jovin Ho, Izzy Kim, Ivy Li, Helynna Lin, Sada Nichols-Worley, Cooper Schmitz, Jonathan Shakespeare, Leon Shi, Alex Song, Alan Yang, Justin Zhang
Evolution and Revolutions in Physics (with Tiki-Toki)
Editors’ Note: In “Advanced Physics: Modern Topics in Physics,” the class is collaborating on a “Timeline” of physics, utilizing the online tool Tiki-Toki. The timeline is an ongoing work in progress throughout the course, hence moments, details, and explanations are added as completed.
Click on the image or here to go the Tiki-Toki site for the timeline.
The best way to view it is as a 3D “highway (look for the round 3d button on the lower left of  your screen), but it is also visible as a conventional 2D side-scrolling timeline. (more…)
your screen), but it is also visible as a conventional 2D side-scrolling timeline. (more…)

Hypoxia: The Forming of Dead Zones
By Rosanna Zhao, V Form, Mary Hoffman, VI Form, and Claire O’Brien, VI Form
Hypoxia: The Forming of Dead Zones
Infographic: https://infograph.venngage.com/ps/l35FghyQ4DM/dead-zone-project
A “Dead Zone” is a region in the ocean in which oxygen concentrations are too low to support healthy marine life. This phenomenon of insufficient oxygen levels is known as hypoxia. Hypoxia is associated with the overabundance of algae which can lead to oxygen deficiency when they cover the water surface and disallow photosynthesis to occur within plants beneath the water. Once a vast body of water becomes hypoxic and oxygen levels drop below 2 ppm DO, a dead zone is formed.
Dead zones occur near coastal regions because the cause of formation is primarily linked with eutrophication. Eutrophication is defined by an excess of nutrient pollution in an open body of water, causing death of animal life due to a deficiency of oxygen. Although nutrients are good for fertilizing plants, nutrient pollution is detrimental to the ocean because it causes chances in the marine ecosystem, resulting in deaths of animals. During the spring and the summer, heavy rain washes nutrients containing nitrogen and phosphorus that farmers use to fertilize their land into streams and rivers. Once these nutrients flow into coastal areas, they stimulate the growth of algae. (more…)

Bee Keeping & Legitimately Fun Facts About Bees!
By Reily Scott, III Form
Bee Keeping & Legitimately Fun Facts About Bees!
 Ever since kindergarten, I have been beekeeping with my mother, but we aren’t the first in our family. Our beekeeping tradition goes back four generations to my great-grandmother Charlotte Ames, but I am the first male beekeeper in my family. My sister, on the other hand, does not want to involve herself with bugs in any way. She will go days without using her bathroom if there is a ladybug somewhere inside.
Ever since kindergarten, I have been beekeeping with my mother, but we aren’t the first in our family. Our beekeeping tradition goes back four generations to my great-grandmother Charlotte Ames, but I am the first male beekeeper in my family. My sister, on the other hand, does not want to involve herself with bugs in any way. She will go days without using her bathroom if there is a ladybug somewhere inside.
I have loved bugs all my life. When I was three or four years old, I would find stinkbugs, because my old house had an abundance of them, and stuff them in my matchbox cars and drive them around town. Though I couldn’t get my hands on bees to put them in cars, I still loved them anyway. (more…)